naoqi ros 开发环境搭建
ROS( robot operating system) 是一款开源的面向与机器人控制领域的操作系统,起源于2007斯坦福大学人工智能实验室的项目与机器人技术公司Willow Garage 的个人机器人项目之间的合作,2008年之后由Willow Garage 推动,2010 年该公司将其开源,2015年,ros 发布了Jade 版本。

书接上回,下面我将带您一览ros和naoqi robot 在ubuntu 14.04(lts)版本下开发环境的搭建。
安装 ros-indigo-desktop
- 1、 配置 Ubuntu 软件仓库
配置你的 Ubuntu 软件仓库(repositories) 以允许 “restricted”、”universe” 和 “multiverse”这三种安装模式。 你可以 按照ubuntu中的配置指南来完成配置。

2、 添加 sources.list
配置你的电脑使其能够安装来自 packages.ros.org的软件。 ROS Indigo 仅 支持 Saucy (13.10) 和 Trusty (14.04)。1
2
3
4
5[官方]
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
[国内镜像]
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'注:强烈建议使用国内或者新加坡的镜像源,这样能够大大提高安装下载速度。
3、 添加 keys
1
2sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
sudo apt-get update4、 桌面版安装: 包含ROS、rqt、rviz以及通用机器人函数库。
1
sudo apt-get install ros-indigo-desktop
5、后续环节
1
2
3
4
5
6
7
8
9
10# 安装 rosinstall
sudo apt-get install python-rosinstall
# 初始化 rosdep
sudo rosdep init
rosdep update
# 配置环境变量 Environment setup
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
. ~/.bashrcnote: If you have more than one ROS distribution installed, ~/.bashrc must only source the setup.bash for the version you are currently using.
启动 ROS on a virtual NAOqi
Before starting, please make sure you meet all the required dependencies especially the packages naoqi_driver, naoqi_bridge and nao_description. You can either install the official releases via your package manager or directly clone the necessary ros packages from github.
1 | #时钟同步,用于同步机器人和开发者PC 指令时钟 |
安装 naoqi 为ros提供的中间接口部件
The core functionality is implemented in the nao_robot stack (can be installed on the robot or on a remote PC), extended with further functionality in nao_extras (should be installed on a remote PC).
1 | sudo apt-get install ros-indigo-nao-robot ros-indigo-nao-extras |
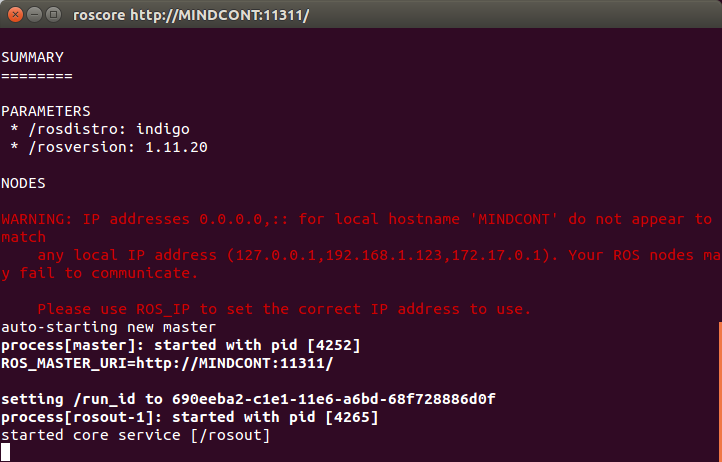
1、运行roscore
打开命令行窗口,这里我们称它为窗口1
1 | roscore |
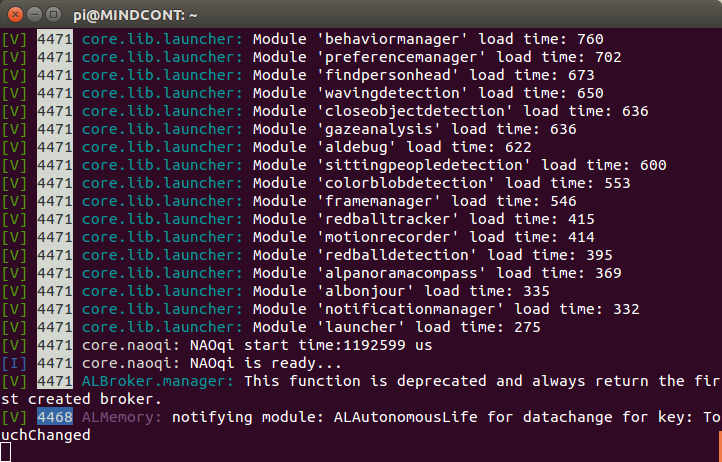
2、运行naoqi-bin 启动虚拟naoqi
再打开一个新的命令行窗口,这里我们称它为窗口2
1 | ~/naoqi/choregraphe-suite-2.1.4.13-linux64/bin/naoqi-bin --verbose --broker-ip 127.0.0.1 |
broker-ip地址127.0.0.1是用于连接到您自己的PC的环回地址。 因此,只有本地ROS可以连接到NAOqi。 NAOqi API可以通过broker-ip地址访问,nao_driver充当NAOqi API的包装器。
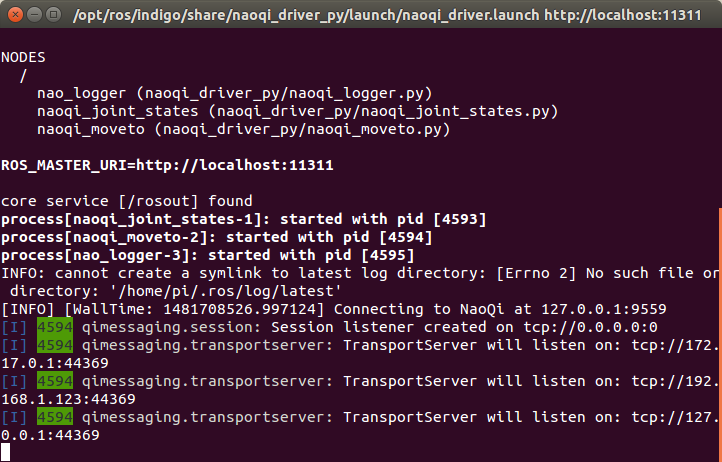
3、然后启动ros_driver包,使ros连接到本地PC上的模拟Naoqi
再打开一个新的命令行窗口,这里我们称它为窗口3,在新终端中运行:
1 | LD_LIBRARY_PATH=~/naoqi/choregraphe-suite-2.1.4.13-linux64/lib:$LD_LIBRARY_PATH NAO_IP=127.0.0.1 roslaunch naoqi_driver_py naoqi_driver.launch |
注意:不要将此路径添加到.bashrc中的全局LD_LIBRARY_PATH,因为其他事情将会中断。 例如 rviz将无法运行与错误
完整输出如下:
1 | ... logging to /home/pi/.ros/log/873f953c-c1d1-11e6-bfbe-68f728886d0f/roslaunch-MINDCONT-32499.log |
至此,你就通过ros -> naoqi_driver -> virtual NAOqi 会话过程的建立,但是还没有可视化过程,下面我们将进行可视化。
通过rviz可视化模拟机器人 Nao robot
关闭所有的窗口,然后打开一个新的窗口,输入下面的指令
1 | roslaunch nao_description display.launch |
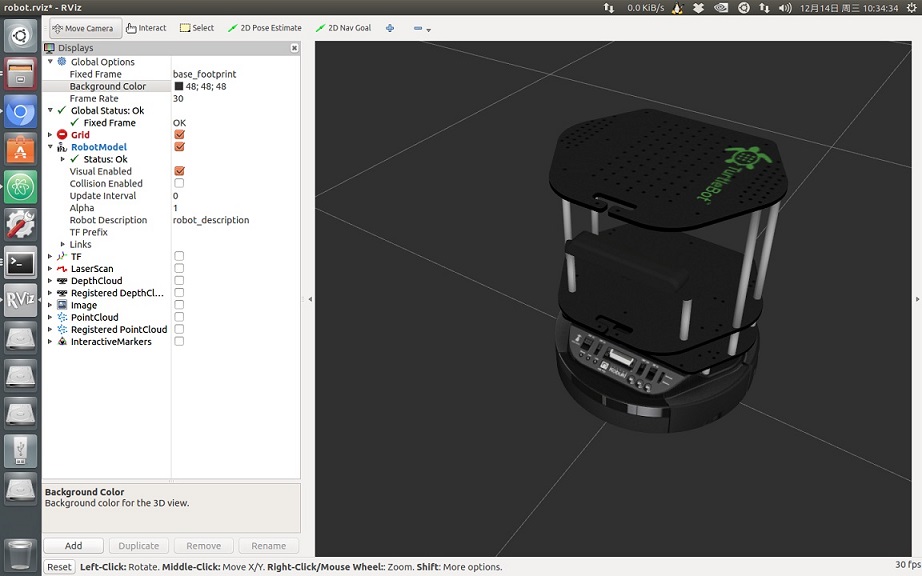
在左上角的“显示”窗口中,将“固定框架”更改为“/ base_link”。如果只有“/ map”选项可用,则不会从上一步加载URDF模型。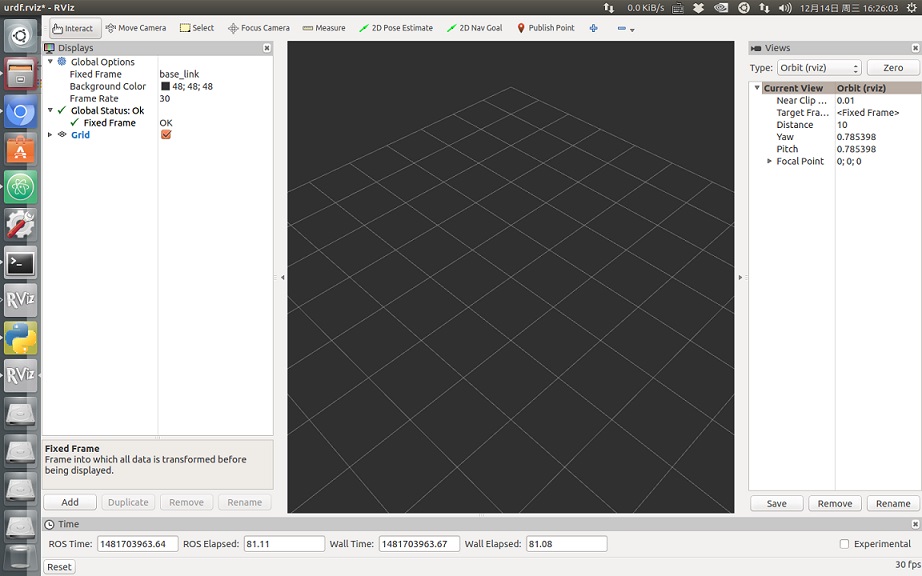
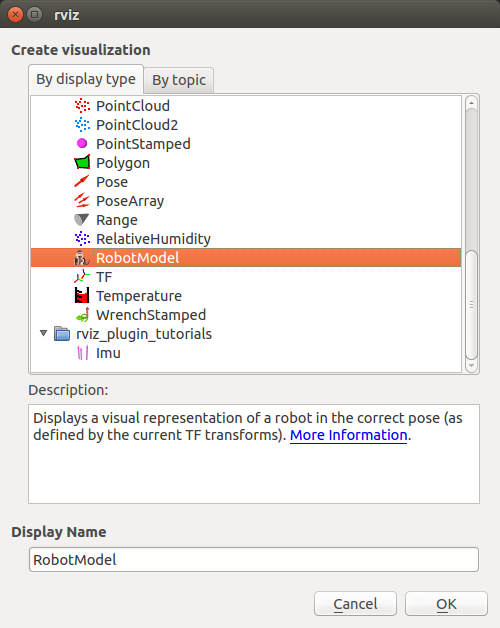
点击“添加”按钮并添加RobotModel
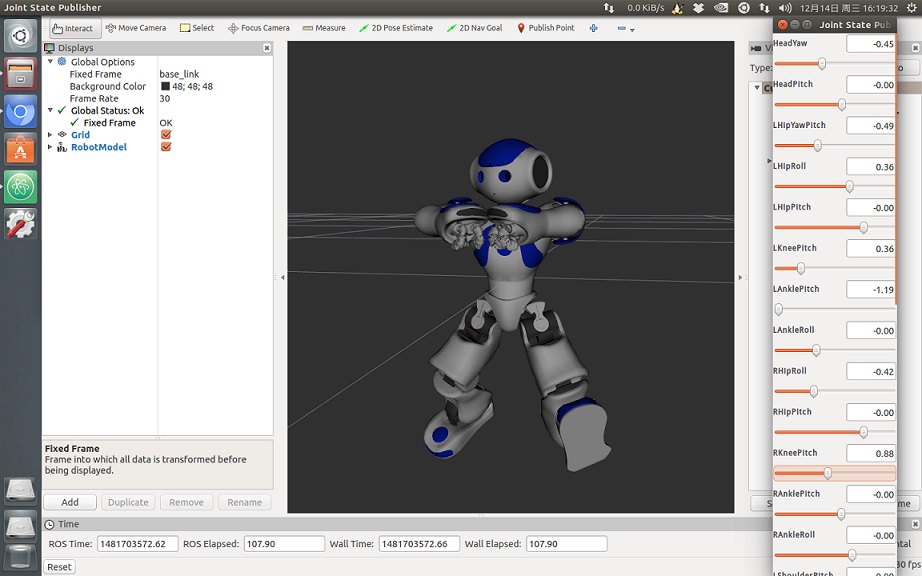
如果一切正常,你会看到一个机器人模型。通过调节右侧的滑块,机器人将做相应的动作。
如果过程中遇到错误和问题,请参考下面的参考链接。
本文系作者原创,转载注明出处 http://blog.mindcont.com/2016/12/14/ros-naoqi-ubuntu/