本文将带您完成naoqi robot SDK 在ubuntu 14.04(lts)下开发环境的配置,这里值得注意的是您不一定需要购买一个naoqi 机器人才能进行开发,这里可以选择使用虚拟机器人,一般开发过程中我们首先将程序指令在虚拟机器人中进行调试,待成功后下载到真实机器人中进行实地运行。
安装 naoqi choregraphe suite Choregraphe是一个多平台的桌面应用程序,允许您:
1、创建动画,行为和对话框,
由于官方提供的链接国内下载容易失败,这里可以使用笔者已经下载好的文件。
1 2 3 4 wget ftp://mindcont.com/IoT/Naoqi/Choregraphe/choregraphe-suite-2.1.4.13-linux64.tar.gz tar -xvf choregraphe-suite-2.1.4.13-linux64.tar.gz naoqi/ cd ~/naoqi/choregraphe-suite-2.1.4.13-linux64/ ./choregraphe
这里先选择试用,当然你可以去开发者社区 申请为开发者,可以无限制的免费使用,但同一时间只能有一个 choregraphe运行。
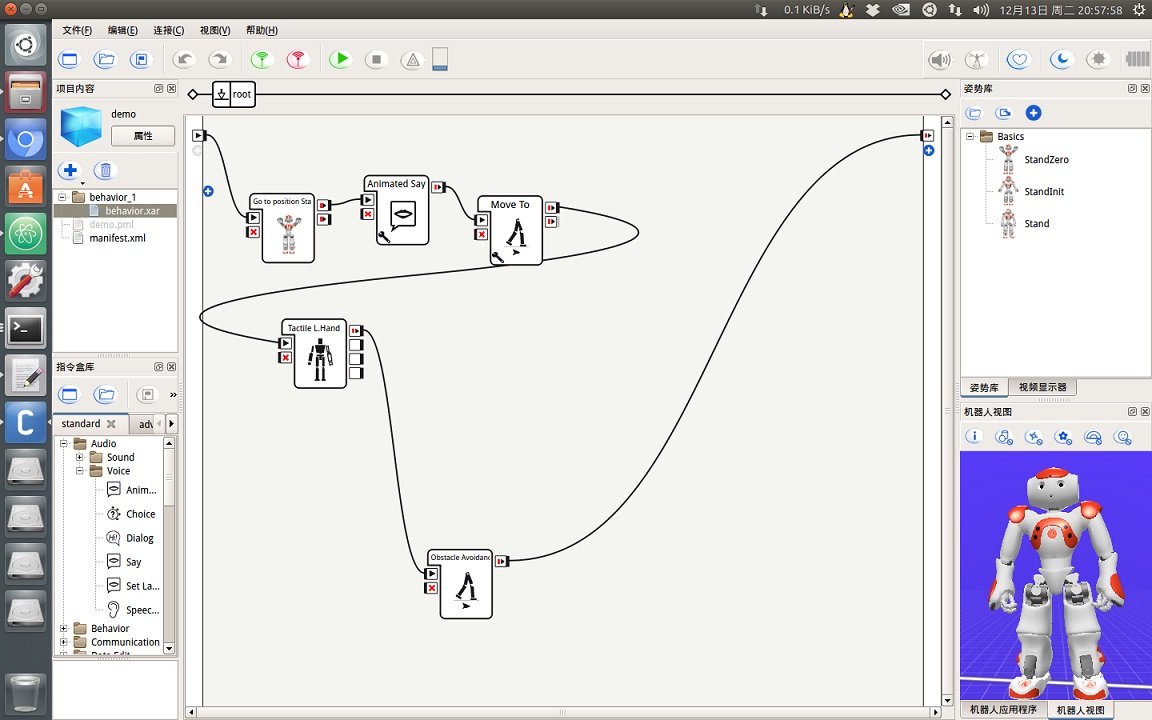
打开后界面如下,类似于matlab 工具箱中的模块化编程,可以在左下角中选择官方封装好的模块,然后用鼠标拖动到中间区域,连线使之成为一个通路,然后点击上方的绿色三角形,让虚拟机器人开始执行。
通过执行naoqi来检查安装是否成功:
1 2 cd ~/naoqi/choregraphe-suite-2.1.4.13-linux64/bin ./naoqi-bin
你应该看到类似的输出:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 pi@MINDCONT:~/naoqi/choregraphe-suite-2.1.4.13-linux64/bin$ ./naoqi-bin [I] 27177 core.naoqi: ..::: starting NAOqi version 2.1.4 :::.. [I] 27177 core.naoqi: Copyright (c) 2005-2013, Aldebaran Robotics [I] 27177 core.naoqi: Build tag: jenkins-release-2.1_choregraphe-suite_linux64-39 [I] 27177 qimessaging.servicedirectory: ServiceDirectory listener created on tcp://0.0.0.0:9559 [I] 27177 qimessaging.transportserver: TransportServer will listen on: tcp://172.17.0.1:9559 [I] 27177 qimessaging.transportserver: TransportServer will listen on: tcp://192.168.1.123:9559 [I] 27177 qimessaging.transportserver: TransportServer will listen on: tcp://127.0.0.1:9559 [I] 27177 qimessaging.servicedirectory: Registered Service "ServiceDirectory" (#1) [I] 27177 qimessaging.servicedirectory: Registered Service "LogManager" (#2) .... .... [I] 27177 Dialog.LongTermMemory: User database creation succeed [I] 27177 Dialog.preference: No dialog history management [I] 27177 Dialog.preference: AI system enabled [I] 27177 Dialog.preference: BNF confidence 0.5 [I] 27177 Dialog.preference: REMOTE confidence 0.3 [I] 27177 Dialog.preference: Serialization enabled [I] 27177 Dialog.preference: Upper SLM 1 [I] 27177 Dialog.preference: Enable auto update [I] 27177 Dialog.preference: Push mode 2 [I] 27177 Dialog.preference: Enable full speech recognition [I] 27177 Dialog.preference: Audio expression enabled [I] 27177 Dialog.preference: Smalldisplacement enabled [I] 27177 Dialog.preference: Breath enabled [I] 27177 Dialog.preference: No animated speech configuration [I] 27177 Dialog.preference: Default volume 0 [I] 27177 Dialog.preference: No dialog history management [I] 27177 Dialog.preference: AI system enabled [I] 27177 Dialog.preference: BNF confidence 0.5 [I] 27177 Dialog.preference: REMOTE confidence 0.3 [I] 27177 Dialog.preference: Serialization enabled [I] 27177 Dialog.preference: Upper SLM 1 [I] 27177 Dialog.preference: Enable auto update [I] 27177 Dialog.preference: Push mode 2 [I] 27177 Dialog.preference: Enable full speech recognition [I] 27177 Dialog.preference: Audio expression enabled [I] 27177 Dialog.preference: Smalldisplacement enabled [I] 27177 Dialog.preference: Breath enabled [I] 27177 Dialog.preference: No animated speech configuration [I] 27177 Dialog.preference: Default volume 0 [I] 27177 qimessaging.servicedirectory: Registered Service "ALDialog" (#77) [I] 27177 core.naoqi: NAOqi is ready...
安装 naoqi python SDK 这里我们采用 naoqi 官方提供的python 接口(类似的还可以选择 java 、c++ 步骤类似),调用封装好的函数,实现自己的功能。我已经下载好windows、mac、linux 各个平台的开发所需的文件,大家可以在ftp://mindcont.com/IoT/Naoqi 自行下载。
1 2 3 4 5 6 7 8 9 10 11 wget ftp://mindcont.com/IoT/Naoqi/sdk/python/pynaoqi-python2.7-2.1.4.13-linux64.tar.gz tar -xvf pynaoqi-python2.7-2.1.4.13-linux64.tar.gz naoqi/ # 配置环境变量,在打开的文本中添加下面的内容.注意换成你的路径 gedit ~/.bashrc # edit for naoqi python sdk export PYTHONPATH=${PYTHONPATH}:/home/pi/naoqi/pynaoqi-python2.7-2.1.4.13-linux64/ # 保存后,输入下面的指令使其生效 source ~/.bashrc
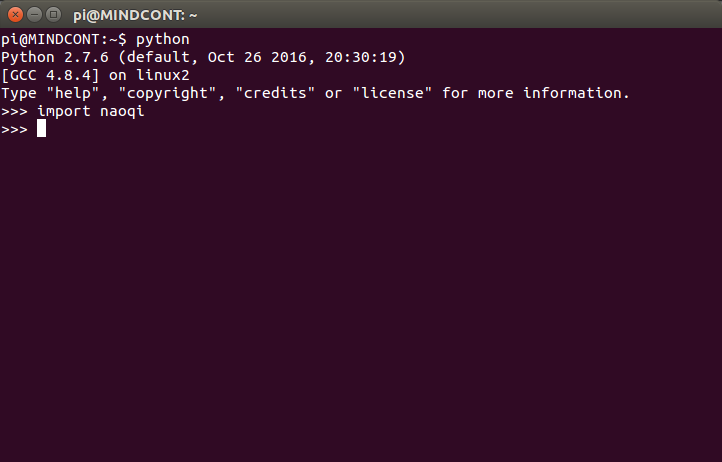
打开新的命令行窗口,用python 的导入naoqi 包,来测试你的路径是否配置成功。如果没有报错,那麽恭喜你完成了naoqi 机器人的开发环境搭建。
Next 下一步,我们会构建基于ROS的 naoqi 机器人开发环境 的搭建,欢迎继续关注。
本文系作者原创,转载注明出处 http://blog.mindcont.com/2016/12/14/naoqi-robot-sdk-ubuntu/
参考